
Die Versionen 1 und 2 des Calliope mini verfügen nur über den einfachen Motorentreiber DRV8837.
Der Calliope mini in der Version 3 ist mit dem zweifachen Motorentreiber DRV8835 ausgestattet.
Die mit einfachen Treibern ausgerüsteter Calliope minis können ein Fahrzeug nur in eine Richtung und nach rechts oder links steuern. Ein Calliope mini V3 ermöglicht das Vor- und Rückwärtsfahren sowie ein schnelles und langsames Drehen in beide Richtungen. Wie genau sich die beiden Treiber unterscheiden, kann hier nachvollzogen werden.
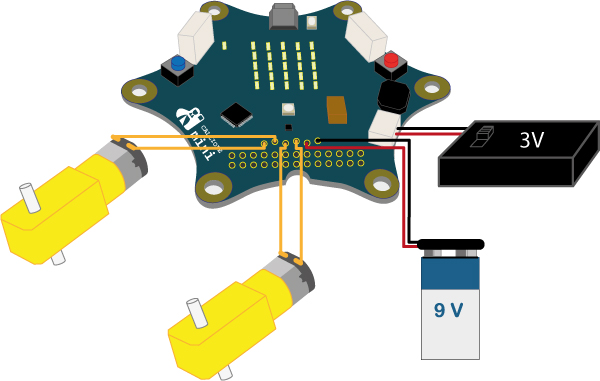
Auf den älteren Boards finden sich die Pins zum Anschließen von Batterie und Motoren in der obersten Reihe der Lötösen auf dem Calliope-Board. Bei der Version 1.0 sind es fünf, bei den Versionen 1.3 und 2.0 sechs Anschlüsse. Bei der Version 1.0 muss deshalb ein GND-Pin aus der Reihe darunter einbezogen werden.
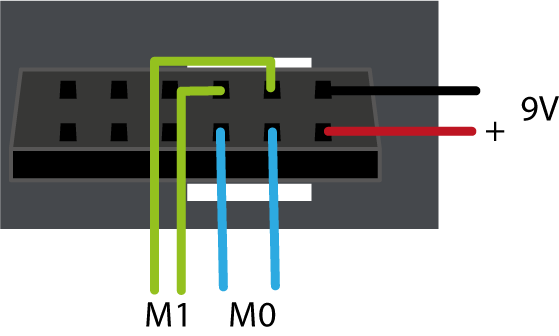
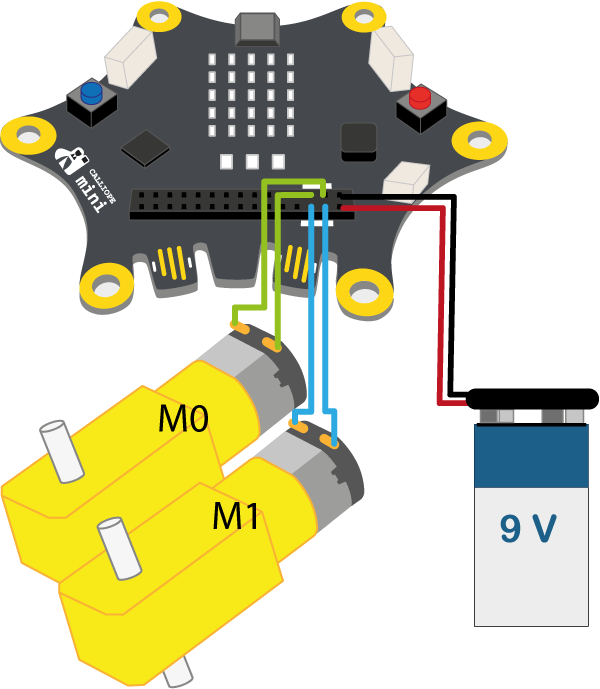
Die Version 3.0 verfügt über eine Buchsenleiste. Die Anschlüsse sind durch weiße Balken an den Seiten der Buchsenleiste kenntlich gemacht.
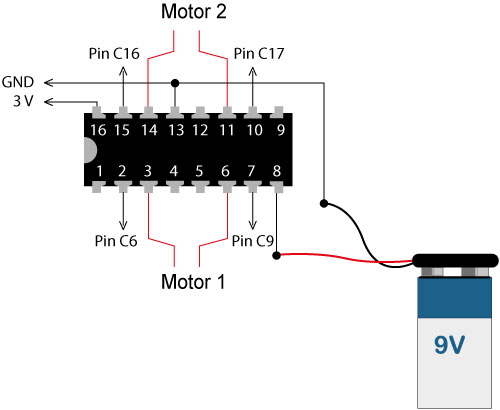
Ältere Boards können mit einem externen Motorentreiber aufgerüstet werden, beispielsweise einem L293D. Er birgt in seinem Innern zwei H-Brücken, die – wie der DRV8835 – eine vollumfängliche Steuerung des Fahrzeugs möglich machen.

Hier das Anschlussschema …
… und ein Layout der Calliope-Pins bei den Versionen 1.3 und 2.0:
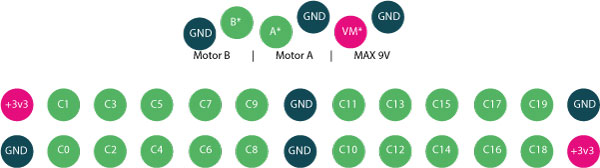
Zum Programmieren müssen die Motoren in dieser Zusammenstellung natürlich über die Pins angesprochen werden, die der Motorentreiber zur Verfügung stellt. Hier also die Pins C6, C9, C16 und C17. Der folgende Beispielcode zeigt wie das geligen kann.
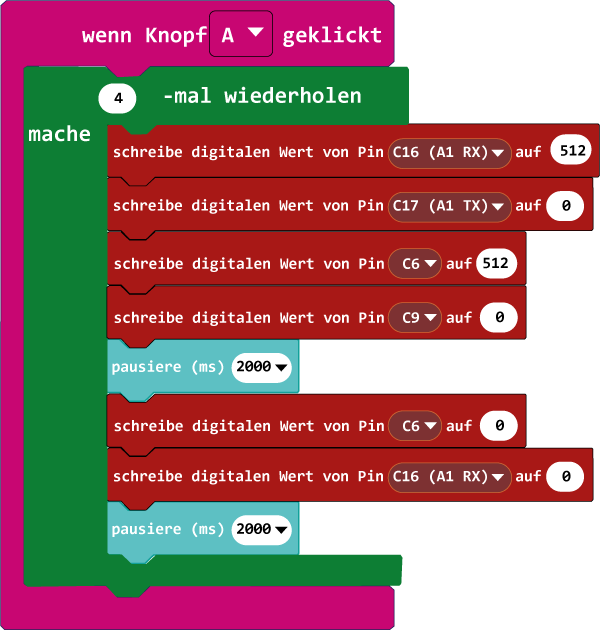
Das Programmierung startet auf Knopfdruck die Motoren viermal für jeweils 2 Sekunden mit reduzierten Drehzahlen. Das Fahrzeug fährt also viermal „ruckweise“ nach vorn und kommt danach zum Stillstand.
Im MakeCode-Editor finden sich die Programmierbausteine (von oben nach unten) unter „Eingabe“, „Schleifen“, „Fortgeschritten“ –> „Pins“ und „Grundlagen“.