
Da Grundschulen nur in Ausnahmefällen über zur Holzbearbeitung geeignete Werkzeuge und Maschinen verfügen, werden hier Fahrzeuge in den Blick genommen, die mit einfachen Mitteln hergestellt werden können. Die Entwicklung soll dabei vom einfachen Fahrgestell zum programmierbaren Fahrzeug führen.
Eine reich bebilderte und sehr ausführliche Anleitung, die weit über die nachfolgenden Erläuterungen hinausreicht, kann hier heruntergeladen werden: Download

Zur Herstellung eines einfachen Gefährts, wie das rechts abgebildete, werden neben Heißkleber und Seitenschneider Trinkhalme, Schaschlikspieße, Holzspatel und Holzräder benötigt, die für wenig Geld im Internet teils im Supermarkt erstanden werden können (Bezugsquellen am Ende des Kapitels).
Zur Konstruktion des Fahrzeugs wird ein Spatel der Länge nach zusammen- und zwei gleichlangen Abschnitten eines Trinkhalms quer dazu geklebt. Danach werden in die Bohrungen der Räder Schaschlikspieße gesteckt, diese durch die Trinkhalme geführt und so eingekürzt, dass das gegenüberliegende Rad Halt findet, ohne die freie Drehbarkeit zu behindern. Wenn nötig, die Räder zusätzlich mit etwas Heißkleber sichern.
Die Funktionstüchtigkeit eines solchen Fahrzeugs kann im Rahmen eines kurzen Wettbewerbs erprobt werden: Über ein schräggestelltes Brett erfahren die Wettbewerbsfahrzeuge eine vergleichbare Beschleunigung, sodass über die zurückgelegte Strecke beim Ausrollen auf ebenem Terrain die Laufeigenschaften beurteilt werden können. Neben der zurückgelegten Strecke kann auch der Geradeauslauf in die Bewertung einbezogen werden.
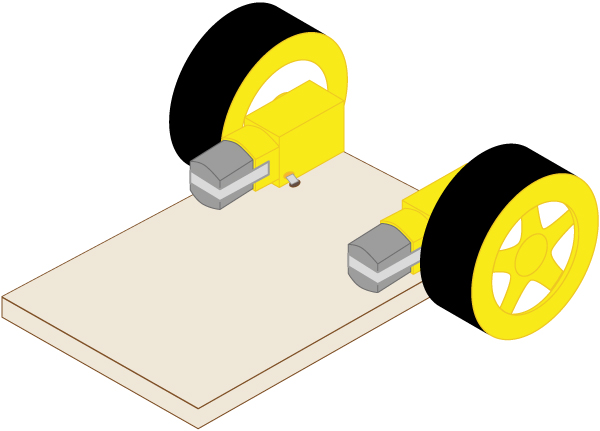
In einem nächsten Schritt wird das Fahrzeug mit Batterie sowie Elektromotor und Rädern ausgestattet. Dazu wirdvom Vorgängerfahrzeug ein Räderpaar entfernt und Motor sowie Batterie mit Heißkleber oder einem Streifen Teppichklebeband wie in der Abbildung links befestigt.
Zum Steuern des Fahrzeugs werden Motor und Batterie über ein zweiadriges Kabel verbunden, an dessen Ende ein Taster (Schließer) angeschlossen ist. Ein Druck auf den Knopf startet den Motor. Wird der Knopf losgelassen, stoppt er.
Da das Gefährt nur geradeaus fahren kann, stellt sich die Frage, wie ein solches Gefährt mit einfachen Mitteln auch nach links und rechts gesteuert werden kann. Einfach meint hier den Verzicht auf eine separate Lenkung, bei der die Räder nach links oder rechts eingeschlagen werden.
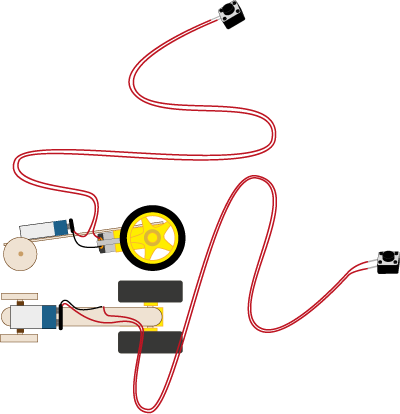
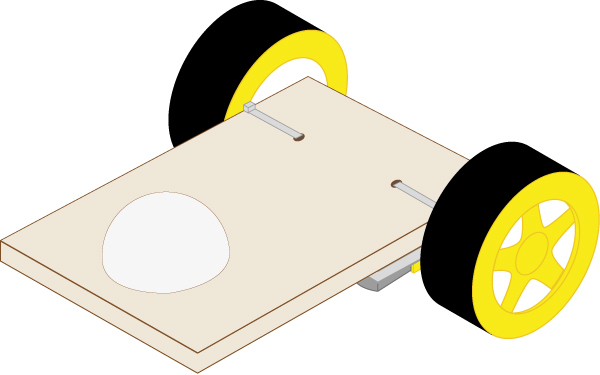
Der Weg dahin führt über die Verwendung von zwei Getriebemotoren, die samt Räder an einem Ende eines 9 x 14 cm großen Sperrholzbrettchens befestigt werden.
Auf der Unterseite wird die Hälfte eines Tischtennisballs mit Heißkleber befestigt, damit das Gefährt in eine waagerechte Position kommt.
Die Lenkung funktioniert über das Ein- und Ausschalten der Motoren: Für den Geradeauslauf müssen beide Motoren, für die Kurvenfahrt ein Motor laufen, der linke für eine Rechts-, der rechte für eine Linkskurve.
Für die Fernsteuerung werden die Motoren wie oben über je einen Taster mit den Batterien verbunden. Durch Drücken des Tasters wird der jeweilige Stromkreis geschlossen und der Motor läuft an. Ist er unterbrochen (Knopf nicht gedrückt) steht der Motor still.
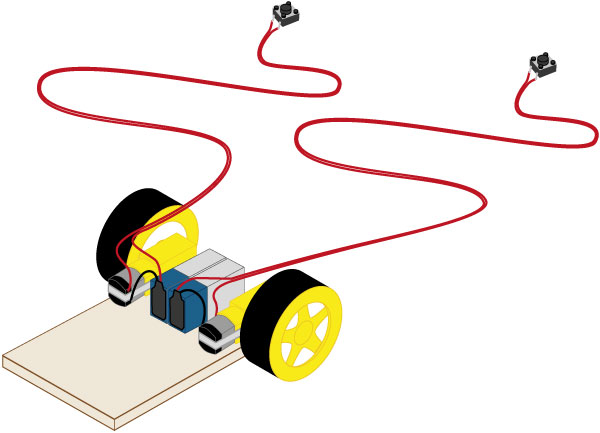
Für eine Geradeausfahrt müssen beide Tasten gedrückt werden. Wird eine losgelassen, dreht das Fahrzeug entweder nach links oder rechts.
Um das Fahrzeug auch rückwärts fahren zu lassen, müsste die Polung der Motoren umkehrbar sein. Das ist mit diesen Mitteln nicht möglich.
Für den letzten Schritt, die Automatisierung der Steuerung, kommt – wie bereits gesagt – ein Calliope mini zum Einsatz.
Wer statt eines Calliopes einen Arduino auf dem Fahrzeug einsetzen möchte, findet hier Näheres in einer PDF-Datei zum Download.
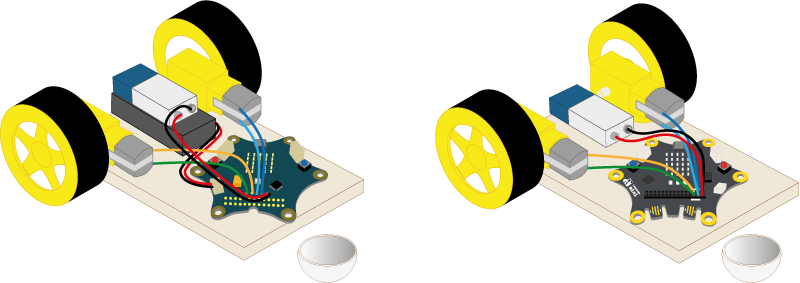
In Anlehnung an die Abbildung unten werden die Motoren am Calliope mini V2 jeweils mit GND und und den Anschlüssen A und B verbunden, der Pluspol des 9V Blocks mit VM+und mit dem Minuspol mit GND. Ein Pinout findet sich auf dieser Seite weiter unten.

Beim Calliope mini V3 sind die Anschlüsse gekennzeichnet. Sie liegen untereinander. Das gilt auch für die beiden Batteriepole. Aber Vorsicht! Der Pluspol ist unten rechts. Ein Verwechseln der Pole kann den Calliope zerstören.
Der Calliope mini V2 benötigt zum Betrieb Strom aus einem Batteriehalter mit zwei AAA Mignonzellen. Er hat einen verpolungssicheren Stecker, der in die dazugehörige Buchse auf dem Calliope gedrückt wird. Beim Calliope mini V3 erfolgt die Stromversorgung über den 9V Block .
Zur Programmierung einer Start/Stopp Funktion wird der „Makecode-Editor“ gestartet, aus dem mittleren Menü „Eingabe“ angewählt und dort der Block „wenn Knopf A geklickt“.
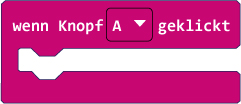
Mit dieser Vorgabe kann sichergestellt werden, dass die Motoren erst dann anlaufen, wenn der Knopf A auf dem Calliope mini gedrückt wird.
Das Starten der Motoren erfolgt über den Block „Motor … an mit … %“, der unter „Motoren“ zu finden ist. Zusammen mit dem Block „pausiere (ms) …“ kann daraus eine Programm erstellt werden, mit dem ein Fahrzeug auf Knopfdruck eine bestimmte Strecke fährt.
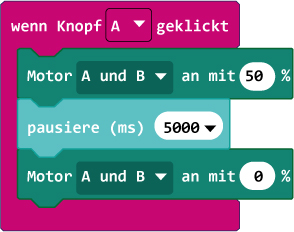
Die Einstellungen „Motor A, B, A und B“ könen durch Anklicken des kleinen weißen Dreiecks vorgenommen werden. Wie bei Prozentzahlen üblich, kann der Wert zwischen 0 und 100 variiert werden, was Einfluss auf die Motordrehzahlen hat.
Bezugsquellen:
Holzspatel und Riemenscheiben aus Holz (Schnurlaufräder) gibt es bei Opitec.
DC-Motoren bei Drucktaster, Stift- und Buchsenleisten, Batterieclips, Getriebemotoren mit Rädern oder ein kompletter Bausatz sowie Jumperkabel können bei roboter-bausatz.de geordert werden.
Zwillingslitze und vieradriges Telefonkabel gibt es als Meterware günstig bei der Firma Völkner.
Hochwertiges Gewebe-Klebeband , das sehr gut klebt und leicht in Stücke und schmale Streifen gerissen werden kann, gibt es im Klebeshop24.
9V Batterieblöcke gibt es günstig bei Aldi und Lidl.