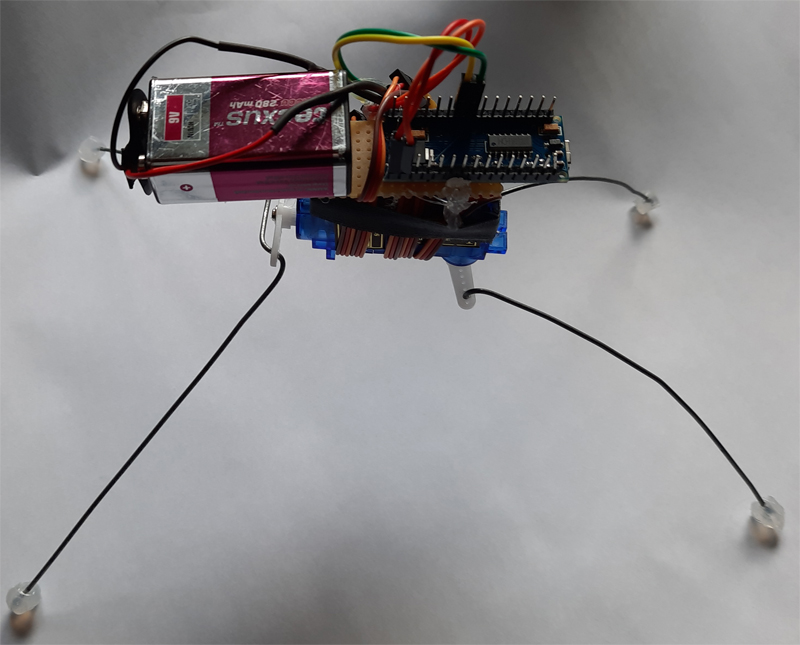
Wer zwei Servo-Motoren, ein kleines Arduino-Board, Batterie, Jumperkabel Heißkleber und ein Stück Draht zur Hand hat, der kann sich an einem vierfüßigen Roboter probieren, der hier in Aktion gesehen werden kann.
In Anlehnung an dieses Muster ist die folgende Anleitung entstanden:
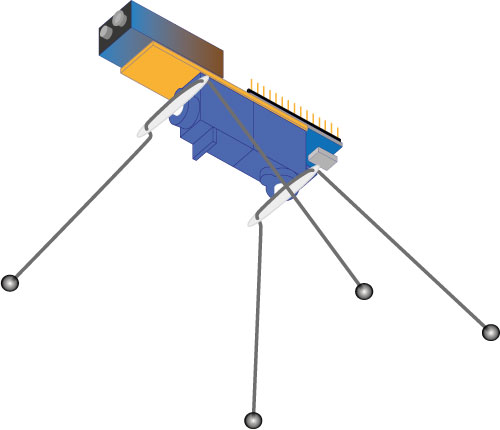
Die Servomotoren werden mit Heißkleber zusammengeklebt. Ein störender Befestigungs-Steg muss dazu abgezwackt werden. Wie oben dargestellt zwei Beinpaare zurechtbiegen und an den Enden mit Heißkleber stand- und rutschfest machen.
Das Tragbrettchen (hier ein Stück Rasterplatine) wird zwischen den Kabeln durchgeführt und darauf der Arduino Nano und die Batterie platziert. Etwas Heißkleber hält die Teile an der gewünschten Stelle.
Programmcode:
#include <Servo.h>
int vorn = 4;
int hinten = 5;
Servo voBeine, hiBeine;
void setup() {
voBeine.attach(vorn);
hiBeine.attach(hinten);
voBeine.write(90); //Vorderbeine justieren
hiBeine.write(90); //Hinterbeine justieren
delay(5000); //Zeit geben, das Objekt zu platzieren
}
void loop() {
voBeine.write(70); //vordere Beine in die eine
delay(200);
hiBeine.write(70); //hintere Beine in die eine ...
delay(200);
voBeine.write(110); //... und die andere Richtung bewegen
delay(200);
hiBeine.write(110); //... und die andere Richtung bewegen
}Viel Spaß beim Ausprobieren!