
Velleman (“Velleman Group“) versteht sich als Entwickler von Modulen und DIY-Bausätzen sowie als Großhändler (“Wholesaler“). Unter der Vielzahl angebotener Produkte sticht der Robotarm KSR10 heraus. Er ist schon geraume Zeit auf dem Markt und kann seit kurzem mit einem USB-Anschluss ausgestattet werden, über den der KSR10 – vergleichbar einem Industrieroboter – programmiert werden kann.
Schade ist, dass Velleman auf eine eigens für PCs entwickelte Software setzt, statt einen Mikrocontroller zu verwenden, der potenziellen Käufern größere Programmier- und Gestaltungsspielräume eröffnete. Was damit gemeint ist, soll der nachfolgende Beitrag verdeutlichen.
Der KSR 10 ist mit 5 Motoren und ebenso vielen Gelenken ausgestattet, was ihm eine Reihe von Funktionen verleiht.
- 1. Der Greifer lässt sich öffnen und schließen sowie
- 2. heben und senken.
- 3. Der obere Ausleger kann hoch und runter,
- 4. der untere vor und zurück bewegt werden.
- 5. Schließlich ist der komplette Arm nach links und rechts schwenkbar.
So können Objekte gezielt angesteuert, gefasst und bewegt werden. Das entspricht näherungsweise dem, was Industrieroboter machen.
Bei dieser spielerischen Annäherung sollte es nicht gleich um Automatisierung, sondern zunächst um das Verständnis gehen, wie komplexe Bewegungen durch eine Kombination von mechanischen und elektrischen Bauteilen Realität werden können.
Der Mechanik und Elektrik des KSR10 kann erklärt werden beim Zusammenbau der vielen Teile, die der „pädagogische Baukasten“ bereitstellt. Eine detaillierten Anleitung hilft, Fehler zu vermeiden..
Zur Stromversorgung dienen 4 große D-Batterien zu je 1,5 Volt. Sie sind im Innern des ausladenden Fußes untergebracht und liefern eine Spannung von 6 Volt. Die Verbindung zu dem Fernsteuermodul ist über ein 10-adriges Flachkabel realisiert. Fünf Schalterwippen machen es möglich, die Motoren vor- und rückwärts laufen zu lassen. Eine LED zwischen den Greifern kann über einen Schiebeschalter an- und ausgemacht werden.
Die elektrischen Leitungen zu den Motoren und zur Handsteuerung liegen offen und können einfach von der Verteilerplatine abgezogen werden. Also Abdeckungen abschrauben, Kabel zu den Motoren und zum Steuermodul von der Verteilerplatine lösen und fertig.
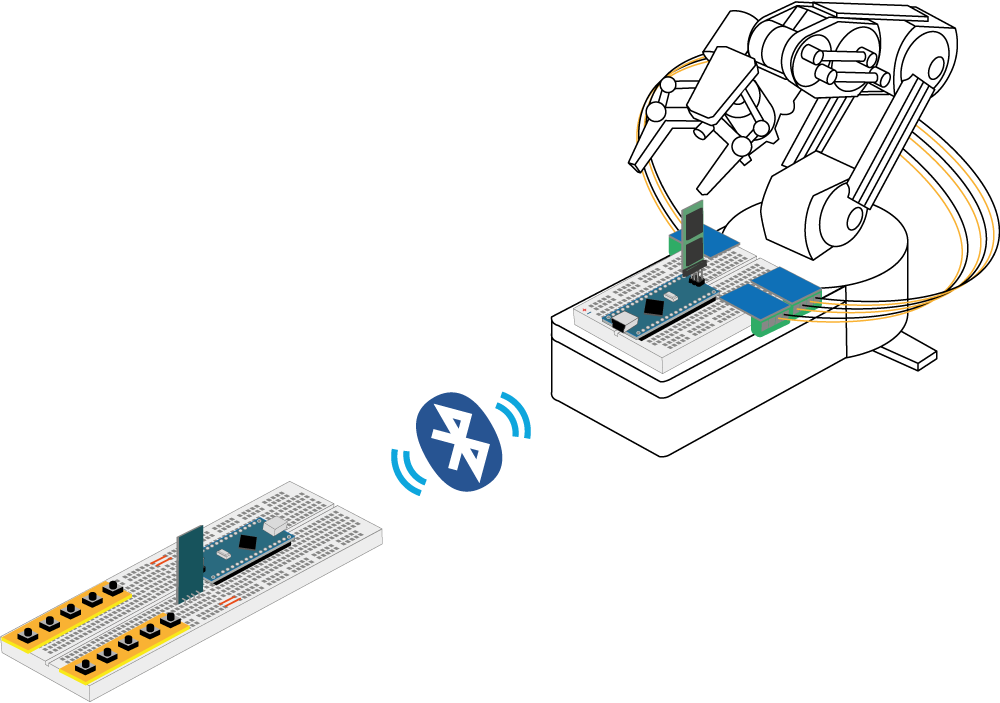
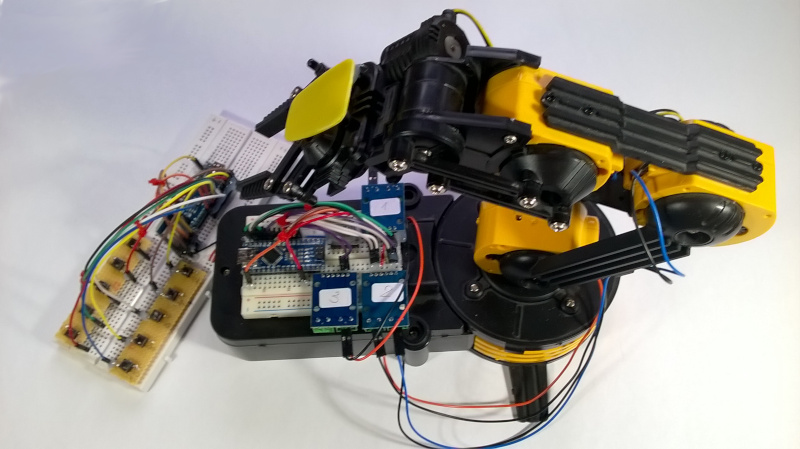
Der Kerngedanke bei der Umgestaltung des Robotarms ist, das Breitbandkabel durch eine Bluetooth-Verbindung entbehrlich zu machen und die Motoren über einen Mikrocontroller anzusteuern. Dazu werden gebraucht: Steckbretter, Arduino Nanos, HC-05 Module, Schalter und Motorentreiber. Den gedachten Aufbau sollen die folgenden Skizzen und ein Foto erhellen.
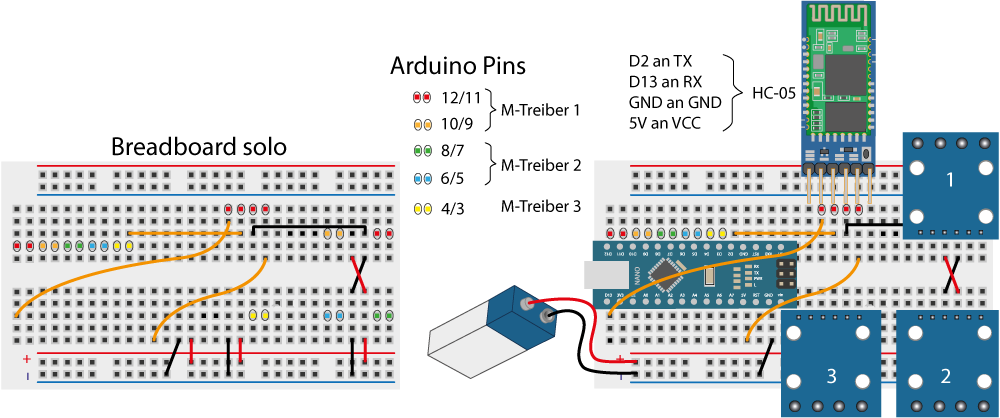
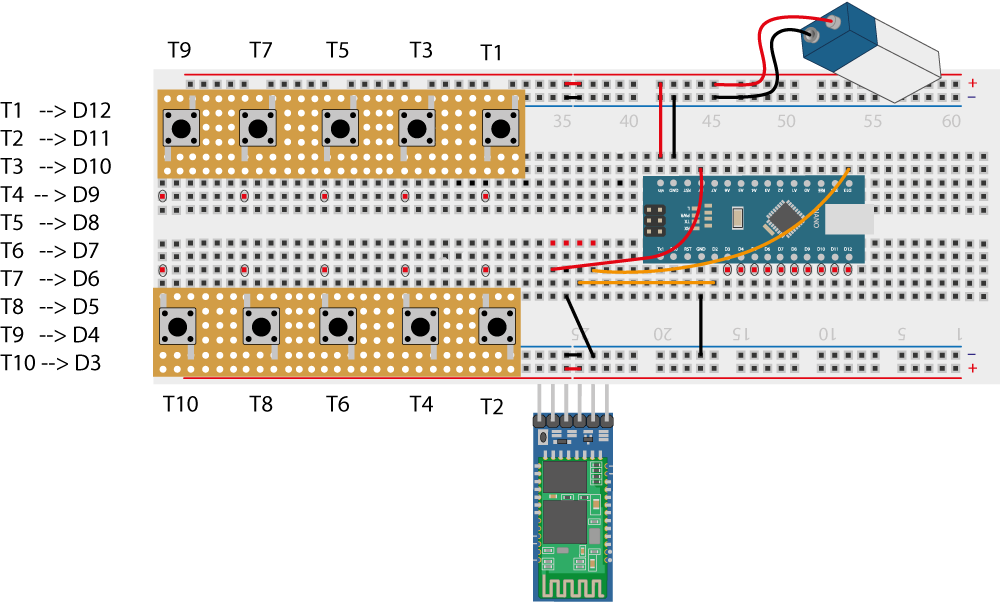
Über je zwei Taster sollen die 5 Motoren per Bluetooth im Vor- und Rücklauf betrieben werden können. Das entspricht dem Konzept, das mithilfe der Schalterwippen im Handsteuermodul realisiert wird. Auf die LED zwischen den Greiferzangen wird verzichtet.
Die Verdrahtung der Komponenten kann in der folgenden Darstellung nachvollzogen werden. Aus Gründen der Übersichtlichkeit sind nur die flach aufliegenden Steckbrücken, nicht aber die herausragenden Jumperkabel dargestellt. Da die Motorentreiber einige Steckbrücken überdecken, ist das Breadboard zusätzlich ohne diese dargestellt. Die Anschlusspunkte für die Jumperkabel sind eingekreist und farblich gekennzeichnet.
Die Programmierung eines solchen Systems ist recht anspruchsvoll und es erscheint lohnend, sich zunächst selbst daran zu probieren, ehe auf den nachfolgend verfügbaren Code zugegriffen wird. Da er ziemlich umfangreich ist, wird er hier als PDF-Datei vorgehalten. Zu empfehlen ist, sich die Datei von einem Browser wie „Firefox“ oder „Chrome“ anzeigen zu lassen. Über „Copy & Paste“ kann dann der Code in einen Arduino-Editor übertragen werden.
Viel Spaß beim Ausprobieren!