Der Bau des hier vorgestellten Fahrzeugs wurde im Rahmen des Technikunterrichts an einer Schule mit voll ausgestatteten Werkräumen realisiert.
Als die Schülerinnen und Schüler das Fahrzeug konstruierten, war ihnen nicht bekannt, dass es später zum Selbstfahrer umgestaltet werden sollte.So waren das für Kinderhände gedachte „Lenkrad“ samt beweglicher Vorderachse und starrer Hinterachse bereits realisiert, als die Idee zum Umbau geboren wurde.
Um das relativ schwere Fahrzeug bewegen zu können, war ein Getriebemotor mit entsprechendem Durchzugsvermögen nötig.
Die Wahl fiel auf auf einen Motor mit beidseitig herausgeführter Antriebswelle (Bezugsquelle am Ende der Ausführungen).
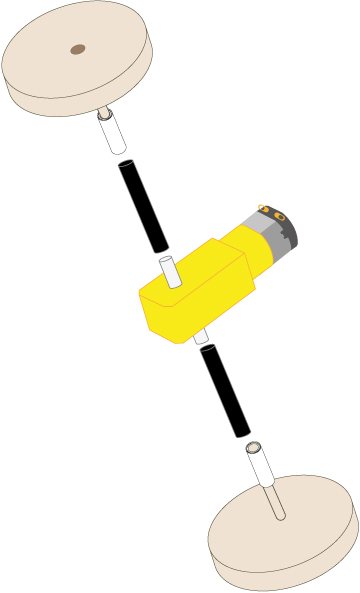
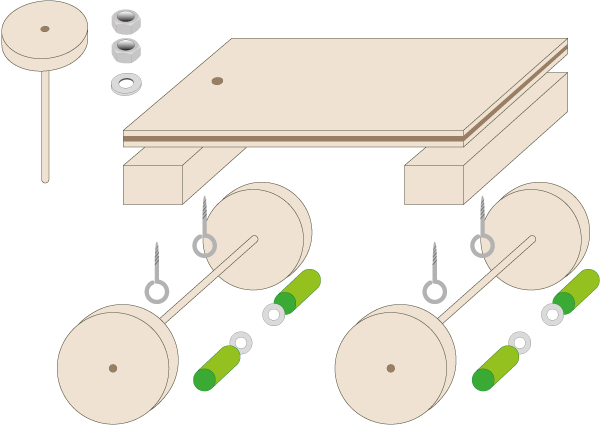
Um ihn einzubauen, musste die Hinterachse aufgetrennt und die Enden eingekürzt werden. Zwei Abschnitte eines dünnen Kunststoffrohrs und Klebeband ermöglichten das Anbringen der Räder. Etwas Heißkleber gab der Sache zusätzlichen Halt.
Der Motor samt Rädern wurde dann – ebenfalls mit mit Heißkleber – mittig auf dem hinteren Vierkantholz festgesetzt.
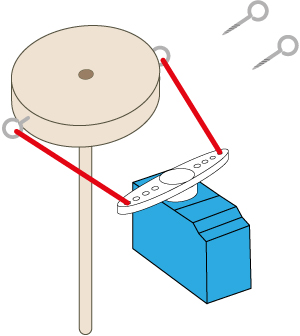
Für die Lenkung kam ein einfacher Servo-Motor (Bezugsquelle am Ende) zum Einsatz, dessen Hebelarme über Schraubösen und Klingeldraht mit dem Lenkrad verbunden wurden.
Die Steuerung der beiden Motoren übernahm ein Calliope mini.
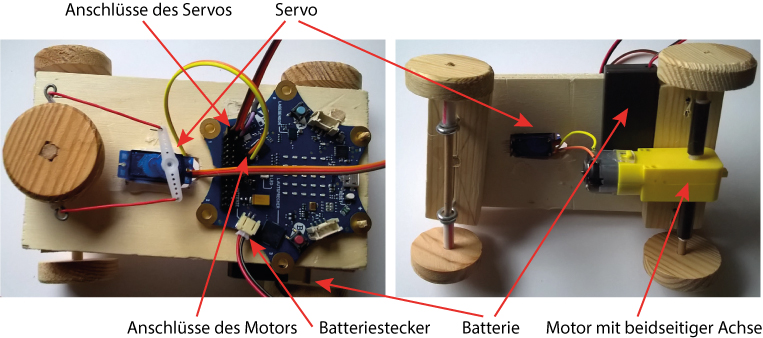
Nach erfolgreichem Zusammenbau präsentiert sich das Gefährt so:
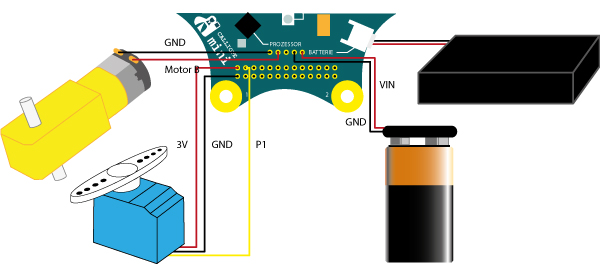
Wie der Calliope mit den Stromquellen und den Motoren verbunden wurde, zeigt der folgende Anschlussplan:
Wie hier näher ausgeführt, wurde ein Calliope mini verwendet, der bereits mit Stiftleisten ausgestattet war, sodass sowohl die Motoren als auch die zusätzliche Spannungsquelle (9V Block) dort angeschlossen werden konnten.
Für eine erste Probefahrt erschien es ausreichend, die Programmierung so anzulegen, dass das Fahrzeug eine bestimmte Strecke geradeaus, dann eine Kurve fährt, zum Startpunkt zurückkehrt und dort anhält.
Hier die dazu passende Programmierung, die alle Steuerkomponenten enthält, der konkreten Situation vor Ort aber noch angepasst werden muss:
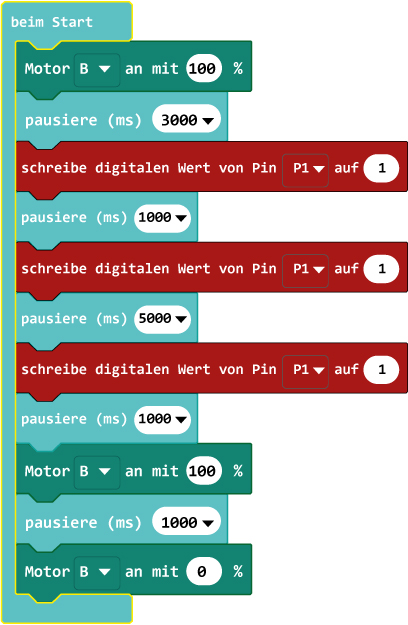
Die Programmierblöcke zur Steuerung der Motoren finden sich im MAKECODE-Editor unter „Grundlagen“, „Motoren“ und durch Anklicken von „… Fortgeschritten“ unter „Pins“
Die Zahlenwerte und Buchstaben können auf den jeweiligen Blöcken durch Anklicken der entsprechenden Felder angepasst werden.
Hinweis: Beim Kurvenfahren, also solange der Servomotor eingeschaltet war, beschleunigte das Fahrzeug, was nicht zu erwarten war. Die Ursache konnte nicht geklärt werden, dürfte aber auf eine Fehlfunktion des Calliope mini hindeuten.
Getriebe– und Servomotor können bei „Roboter-Bausatz.de“ preisgünstig erworben werden.