Der Calliope mini und der BBC micro:bit verstehen sich. So kann beispielsweise ein Fahrzeug, dessen Motoren an den Motor-Pins des Calliope mini hängen, per Bluetooth von einem micro:bit gesteuert werden.
Der Calliope mini muss dabei unter https://makecode.calliope.cc/#editor und der micro:bit unter https://makecode.microbit.org/#editor programmiert werden.
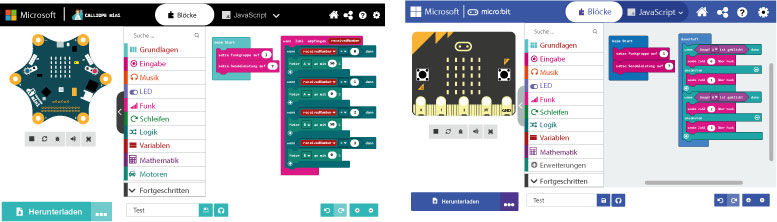
In JavaScript lautet der Code:
| radio.setTransmitPower(7) radio.setGroup(1) radio.onReceivedNumber(function (receivedNumber) { if (receivedNumber == 0) { motors.dualMotorPower(Motor.A, 50) } if (receivedNumber == 1) { motors.dualMotorPower(Motor.A, 0) } if (receivedNumber == 2) { motors.dualMotorPower(Motor.B, 50) } if (receivedNumber == 3) { motors.dualMotorPower(Motor.B, 0) } }) | radio.setGroup(1) radio.setTransmitPower(7) basic.forever(function () { if (input.buttonIsPressed(Button.A)) { radio.sendNumber(0) } else { radio.sendNumber(1) } if (input.buttonIsPressed(Button.B)) { radio.sendNumber(2) } else { radio.sendNumber(3) } }) |
Leider scheint es so zu sein, dass für die beiden Mikrocontroller keine gemeinsame Programmieroberfläche existiert. Um so schöner ist es, dass die beiden auf der Hardware-Ebene harmonieren.